全國咨詢熱線:
全國咨詢熱線:
“為什么現代電纜生產離不開繞包工藝?如何通過視頻教程快速掌握設備操作技巧?” 這個問題困擾著許多剛入行的電纜工程師和技術人員。隨著全球電纜行業年增長率超過5%,繞包機作為電纜屏蔽層、絕緣層制造的核心設備,其重要性不言而喻。本文將通過結構拆解、動態原理分析,并結合視頻教程的實操優勢,帶您徹底讀懂電纜繞包機的工作邏輯。
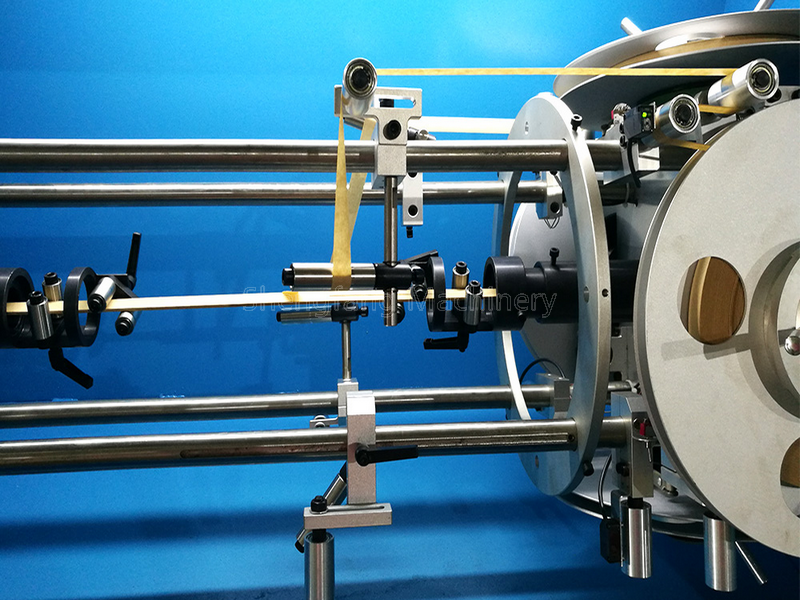
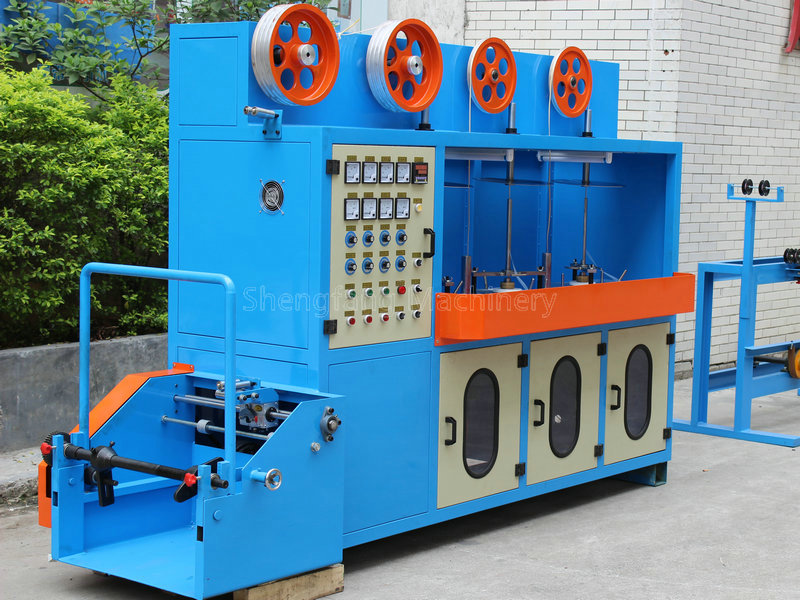
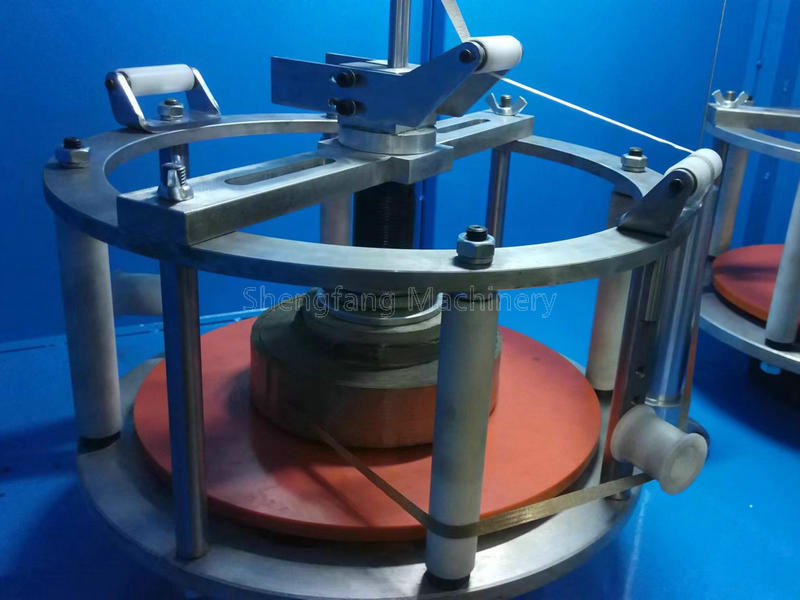
電纜繞包機主要由放線架、繞包頭、張力控制系統、收線裝置四大模塊構成。其中,*繞包頭*是核心部件,通過精密齒輪組驅動繞包帶(如鋁箔、云母帶)以螺旋形式均勻包裹在導體表面。 -放線架:采用雙工位設計,支持無間斷換卷,確保生產連續性。 -張力控制:通過磁粉制動器或伺服電機實現0.1N·m級精度調節,防止繞包帶過緊斷裂或過松起皺。 -收線裝置:配備PID閉環控制系統,線速度最高可達120m/min,誤差控制在±0.5%以內。
繞包動作本質上是導體軸向運動與繞包帶周向旋轉的合成。當導體以設定速度(如30m/min)通過繞包頭時,繞包帶在伺服電機驅動下以1500rpm轉速旋轉,形成55°-65°的螺旋傾角。此過程中,*重疊率*需嚴格控制在20%-30%之間,以確保屏蔽層無縫隙。
線速度與轉速匹配公式: ( N = rac{V imes cosθ}{pi imes D} ) (N:繞包頭轉速;V:導體線速度;D:導體直徑;θ:繞包角)
張力反饋機制:通過張力傳感器實時監測繞包帶拉力,自動調整制動器電流,維持張力恒定。
現代繞包機集成PLC控制系統,可實時監測斷帶、跑偏、過載等12類異常狀態。例如當檢測到繞包帶偏移量超過2mm時,設備會在0.3秒內觸發急停,并通過HMI界面顯示故障代碼。
相比文字說明書,電纜繞包機操作視頻教程能更直觀展示設備運行細節:
在視頻教程中,需特別強調三層質量檢測節點:
Copyright ? 2009 All Rights Reserved. 備案號:粵ICP備17125773號
服務熱線